Magnetic Levitation
Levitation from 1996 Popular Electronics
- Introduction
- How It Works
- Control Systems
- Open or Closed?
- Basics of PID
- Schematic
- Circuit
- Construction
- Adjustment
Basics of PID
Figure 3 shows a block diagram of a closed-loop heating system that contains a PID controller. Notice that a PID controller contains all of the basic building blocks contained in an open-loop controller and also the components contained in a bang-bang controller. However, another block called a compensator is added. The compensator itself contains three new "blocks" of amplifiers labeled P (Proportional), I (Integral), and D (Derivative), and an adder to combine the three outputs.
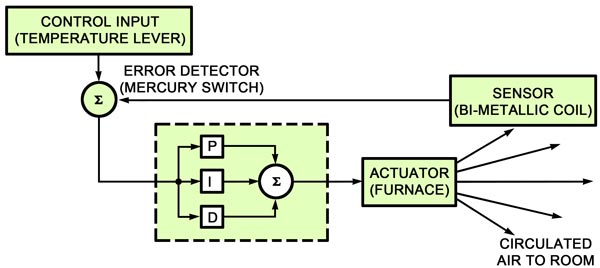
Fig. 3. This closed-loop heating system contains a PID controller. When a PID controller operates, the sensor measures the error in the plant's output and adjusts the actuator to activate proportionally to the error. That results in a smooth response.
The P block is an op-amp that you would use to boost the gain of an audio signal; the I and D blocks are also amplifiers. In a PID controller, the P block is probably the most important part. The I and D parts are there to fix up problems that can occur in particularly unstable systems. Therefore, in many situations you can eliminate the I or D part (or even both) and the PID controlier will work fine.
When a PID controller operates, the sensor measures the error in the plant's output and adjusts the actuator to activate proportionally to the error. That will achieve a smooth response and prevent a system from operating just like a bang-bang controller.
To see how all the basics we looked at can be applied, and to deal with how the I and D parts of a PID controller work, let's now move on to the Levitator itself.
This article is reprinted from Popular Electronics, May 1996.
| < Previous | Page 5 of 9 | Next > |
©1998-2026 Barry Hansen